Quantitative Results
State-of-the-Art Performance
Mean extremity height normalized to [0, 1] where 1.0 is fully upright. Averaged over 10 random seeds across all environments.
| Environment | CIP (ours) | Empowerment | DIAYN | DADS | SMM | ICM |
|---|---|---|---|---|---|---|
| Cart Pole | 0.9996 | 0.9996 | 0.0221 | 0.0684 | 0.6171 | 0.0005 |
| Double Pendulum | 0.9913 | 0.5433 | 0.2339 | 0.0107 | 0.0112 | 0.0016 |
| Triple Pendulum | 0.9931 | 0.2963 | 0.4865 | 0.0608 | 0.2513 | 0.0069 |
| Gibbon | 0.9319 | 0.2835 | 0.4649 | 0.1430 | 0.4458 | 0.5122 |
Mean extremity height over the final 10% of each episode, averaged across 10 random seeds. Values are min–max normalized so that 0.0 is the initial hanging configuration and 1.0 is the fully upright pose. Bold indicates best performance.
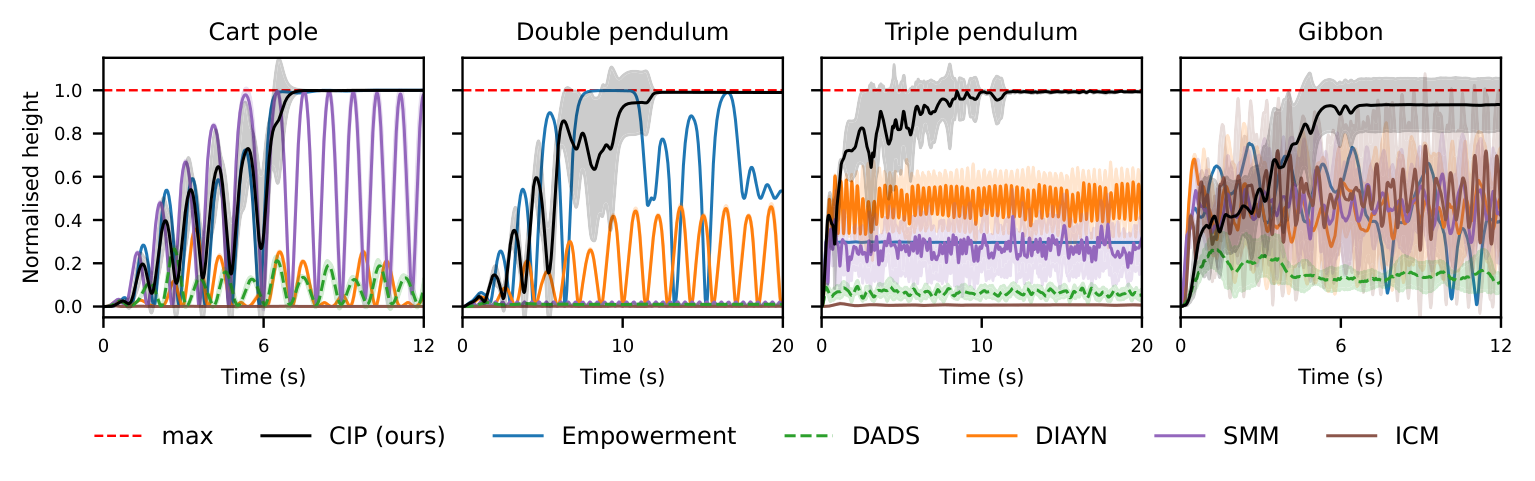
Fig. 1. Mean height ± std of the extremity over time in each environment. Heights are normalized between 0.0 (hanging) and 1.0 (fully upright). Averaged over 10 random seeds. CIP (green) consistently reaches and maintains upright posture while baselines plateau or fail.
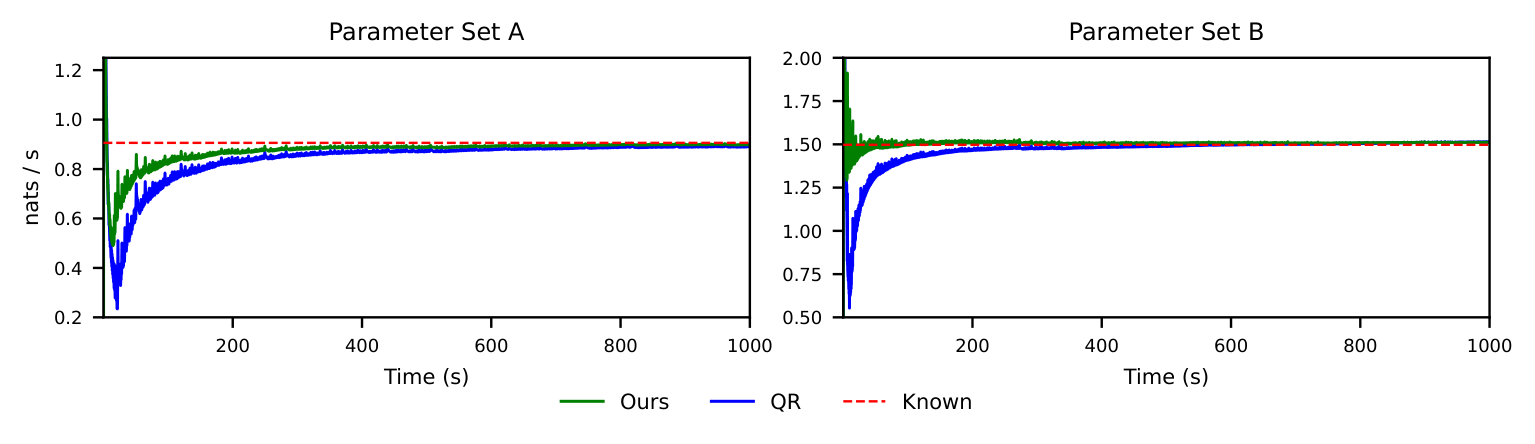
Fig. 2. Kolmogorov-Sinai entropy (KSE) estimation on the Lorenz attractor in two typical parameter regimes. Our estimator (green) converges faster than the standard QR-based approach (blue) in both chaotic regimes.
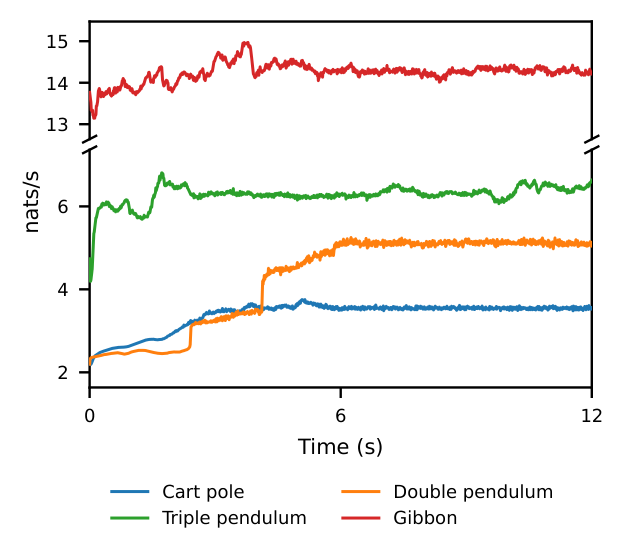
Fig. 3. Estimated values of CIP (nats/s) over time for each environment during MPC runs. Higher CIP values correspond to agents exploring dynamically richer regions of state space.